4.2 Remote library interface
The remote library interface provides means for having test libraries on different machines than where Robot Framework itself is running, and also for implementing libraries using other languages than the natively supported Python and Java. For a test library user remote libraries look pretty much the same as any other test library, and developing test libraries using the remote library interface is also very close to creating normal test libraries.
- 4.2.1 Introduction
- 4.2.2 Taking Remote library into use
- 4.2.3 Supported argument and return value types
- 4.2.4 Remote protocol
4.2.1 Introduction`
There are two main reasons for using the remote library API:
- It is possible to have actual libraries on different machines than where Robot Framework is running. This allows interesting possibilities for distributed testing.
- Test libraries can be implemented using any language that supports XML-RPC protocol. At the time of this writing there exists ready-made remote servers for Python, Java, Ruby, .NET, Clojure, Perl and node.js.
The remote library interface is provided by the Remote library that is one of the standard libraries. This library does not have any keywords of its own, but it works as a proxy between the core framework and keywords implemented elsewhere. The Remote library interacts with actual library implementations through remote servers, and the Remote library and servers communicate using a simple remote protocol on top of an XML-RPC channel. The high level architecture of all this is illustrated in the picture below:
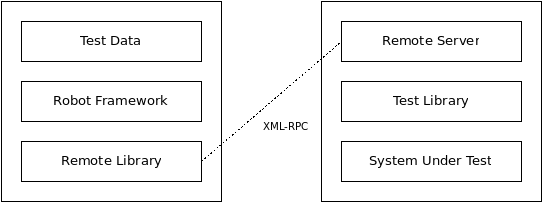
Robot Framework architecture with Remote library
Note
The remote client uses Python's standard xmlrpclib module. It does not support custom XML-RPC extensions implemented by some XML-RPC servers.
4.2.2 Taking Remote library into use
Importing Remote library
The Remote library needs to know the address of the remote server but otherwise importing it and using keywords that it provides is no different to how other libraries are used. If you need to use the Remote library multiple times in a test suite, or just want to give it a more descriptive name, you can import it using the WITH NAME syntax.
| Importing Remote library | |||||
|---|---|---|---|---|---|
| Setting | Value | Value | Value | Value | Value |
| Library | Remote | http://127.0.0.1:8270 | WITH NAME | Example1 | |
| Library | Remote | http://example.com:8080/ | WITH NAME | Example2 | |
| Library | Remote | http://10.0.0.2/example | 1 minute | WITH NAME | Example3 |
The URL used by the first example above is also the default address that the Remote library uses if no address is given. Similarly port 8270 is the port that remote servers are expected to use by default. (82 and 70 are the ASCII codes of letters R and F, respectively.)
Note
When connecting to the local machine, it is recommended to use address 127.0.0.1 instead of localhost. This avoids address resolution that can be extremely slow at least on Windows. Prior to Robot Framework 2.8.4 the Remote library itself used the potentially slow localhost by default.
Note
Notice that if the URI contains no path after the server address, xmlrpclib module used by the Remote library will use /RPC2 path by default. In practice using http://127.0.0.1:8270 is thus identical to using http://127.0.0.1:8270/RPC2\. Depending on the remote server this may or may not be a problem. No extra path is appended if the address has a path even if the path is just /. For example, neither http://127.0.0.1:8270/ nor http://127.0.0.1:8270/my/path will be modified.
The last example above shows how to give a custom timeout to the Remote library as an optional second argument. The timeout is used when initially connecting to the server and if a connection accidentally closes. Timeout can be given in Robot Framework time format like 60s or 2 minutes 10 seconds.
The default timeout is typically several minutes, but it depends on the operating system and its configuration. Notice that setting a timeout that is shorter than keyword execution time will interrupt the keyword.
Note
Support for timeouts is a new feature in Robot Framework 2.8.6. Timeouts do not work with Python/Jython 2.5 nor with IronPython.
Starting and stopping remote servers
Before the Remote library can be imported, the remote server providing the actual keywords must be started. If the server is started before launching the test execution, it is possible to use the normal Library setting like in the above example. Alternatively other keywords, for example from OperatingSystem or SSH libraries, can start the server up, but then you may need to use Import Library keyword because the library is not available when the test execution starts.
How a remote server can be stopped depends on how it is implemented. Typically servers support the following methods:
- Regardless of the library used, remote servers should provide Stop Remote Server keyword that can be easily used by executed tests.
- Remote servers should have stop_remote_server method in their XML-RPC interface.
- Hitting Ctrl-C on the console where the server is running should stop the server.
- The server process can be terminated using tools provided by the operating system (e.g. kill).
Note
Servers may be configured so that users cannot stop it with Stop Remote Server keyword or stop_remote_server method.
4.2.3 Supported argument and return value types
Because the XML-RPC protocol does not support all possible object types, the values transferred between the Remote library and remote servers must be converted to compatible types. This applies to the keyword arguments the Remote library passes to remote servers and to the return values servers give back to the Remote library.
Both the Remote library and the Python remote server handle Python values according to the following rules. Other remote servers should behave similarly.
- Strings, numbers and Boolean values are passed without modifications.
- Python None is converted to an empty string.
- All lists, tuples, and other iterable objects (except strings and dictionaries) are passed as lists so that their contents are converted recursively.
- Dictionaries and other mappings are passed as dicts so that their keys are converted to strings and values converted to supported types recursively.
- Strings containing bytes in the ASCII range that cannot be represented in XML (e.g. the null byte) are sent as Binary objects that internally use XML-RPC base64 data type. Received Binary objects are automatically converted to byte strings.
- Other types are converted to strings.
Note
Prior to Robot Framework 2.8.3, only lists, tuples, and dictionaries were handled according to the above rules. General iterables and mappings were not supported.
Binary support is new in Robot Framework 2.8.4.
4.2.4 Remote protocol
This section explains the protocol that is used between the Remote library and remote servers. This information is mainly targeted for people who want to create new remote servers. The provided Python and Ruby servers can also be used as examples.
The remote protocol is implemented on top of XML-RPC, which is a simple remote procedure call protocol using XML over HTTP. Most mainstream languages (Python, Java, C, Ruby, Perl, Javascript, PHP, ...) have a support for XML-RPC either built-in or as an extension.
Required methods
A remote server is an XML-RPC server that must have the same methods in its public interface as the dynamic library API has. Only get_keyword_names and run_keyword are actually required, but get_keyword_arguments and get_keyword_documentation are also recommended. Notice that using camelCase format in method names is not possible currently. How the actual keywords are implemented is not relevant for the Remote library. A remote server can either act as a wrapper for real test libraries, like the provided Python and Ruby servers do, or it can implement keywords itself.
Remote servers should additionally have stopremote_server method in their public interface to ease stopping them. They should also automatically expose this method as _Stop Remote Server keyword to allow using it in the test data regardless of the test library. Allowing users to stop the server is not always desirable, and servers may support disabling this functionality somehow. The method, and also the exposed keyword, should return True or False depending was stopping allowed or not. That makes it possible for external tools to know did stopping the server succeed.
The provided Python remote server can be used as a reference implementation.
Getting remote keyword names and other information
The Remote library gets a list of keywords that the remote server provides using get_keyword_names method. This method must return the keyword names as a list of strings.
Remote servers can, and should, also implement get_keyword_arguments and get_keyword_documentation methods to provide more information about the keywords. Both of these keywords get the name of the keyword as an argument. Arguments must be returned as a list of strings in the same format as with dynamic libraries, and documentation must be returned as a string.
Starting from Robot Framework 2.6.2, remote servers can also provide general library documentation to be used when generating documenation with libdoc tool.
Executing remote keywords
When the Remote library wants the server to execute some keyword, it calls remote server's run_keyword method and passes it the keyword name, a list of arguments, and possibly a dictionary of free keyword arguments. Base types can be used as arguments directly, but more complex types areconverted to supported types.
The server must return results of the execution in a result dictionary (or map, depending on terminology) containing items explained in the following table. Notice that only the status entry is mandatory, others can be omitted if they are not applicable.
| Entries in the remote result dictionary | |
|---|---|
| Name | Explanation |
| status | Mandatory execution status. Either PASS or FAIL. |
| output | Possible output to write into the log file. Must be given as a single string but can contain multiple messages and different log levels in format INFO First message\nHTML <b>2nd</b>\nWARN Another message. It is also possible to embed timestamps to the log messages like INFO:1308435758660 Message with timestamp. |
| return | Possible return value. Must be one of the supported types. |
| error | Possible error message. Used only when the execution fails. |
| traceback | Possible stack trace to write into the log file using DEBUG level when the execution fails. |
| continuable | When set to True, or any value considered True in Python, the occurred failure is considered continuable. New in Robot Framework 2.8.4. |
| fatal | Like continuable, but denotes that the occurred failure is fatal. Also new in Robot Framework 2.8.4. |
Different argument syntaxes
The Remote library is a dynamic library, and in general it handles different argument syntaxes according to the same rules as any other dynamic library. This includes mandatory arguments, default values, varargs, as well as named argument syntax.
Also free keyword arguments (kwargs) works mostly the same way as with other dynamic libraries. First of all, the get_keyword_arguments must return an argument specification that contains kwargs exactly like with any other dynamic library. The main difference is that remote servers'run_keyword method must have optional third argument that gets the kwargs specified by the user. The third argument must be optional because, for backwards-compatibility reasons, the Remote library passes kwargs to the run_keyword method only when they have been used in the test data.
In practice run_keyword should look something like the following Python and Java examples, depending on how the language handles optional arguments.
def run_keyword(name, args, kwargs=None):
# ...
public Map run_keyword(String name, List args) {
// ...
}
public Map run_keyword(String name, List args, Map kwargs) {
// ...
}
Note
Remote library supports **kwargs starting from Robot Framework 2.8.3.